The humanoid robot Unitree G1 has made a breakthrough in robotics by learning to overcome complex obstacles using not only its legs but also its hands and body. Thanks to new algorithms and advanced sensors, the machine can perform maneuvers that were previously only possible for humans.
This is reported by Finway
Advanced Technologies and Autonomous Navigation
Unitree G1 is equipped with a Intel RealSense D435i depth camera located on its “head,” allowing the robot to gather three-dimensional information about its environment at a rate of 50 frames per second. This ensures accurate distance measurement to objects and dynamic trajectory correction during movement. It is also impressive that the robot operates completely autonomously: it does not require GPS, external sensors, or a specific starting position. All calculations are performed on board the device using a central processor, and the area for confident trick execution measures 1.2 × 1.2 meters around the calculated point.
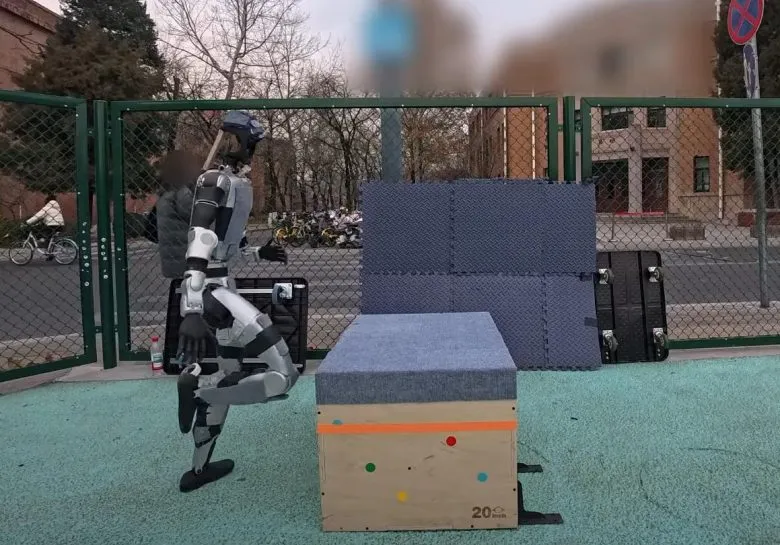
“The humanoid robot Unitree G1 has learned to overcome obstacles using not only its legs but also its hands and even its body. It can lean on a barrier with its hands, roll over it on its back, perform a flip jump over its head, or jump onto a box by pushing off with its hips. Such fluidity of movement has been made possible by the combination of computer vision and reinforcement learning.”
Training Through Simulation and Experience of Parkour Athletes
In preparation for real-world conditions, engineers from Tsinghua University used a motion capture system to record the actions of professional parkour athletes. Simultaneously, obstacles were scanned with a lidar, and the collected data was transferred to the 29-joint G1 model. The algorithm was trained in thousands of simulations at the NVIDIA Isaac Lab, where the robot received “rewards” for movement accuracy and “penalties” for abrupt or undesirable contacts with surfaces.
To enhance resilience to real-world conditions, noise, glare, and various image distortions were added during training in the simulation. Testing results, both indoors and outdoors, showed that the robot demonstrates high stability and flexibility in its movements, executing complex tricks, including flips and rolls over barriers.